![[{[item.product.name]}]]([{[item.product.photo.url]}] 125w)

-
LiDAR DJI Zenmuse L1






| Wysyłka w ciągu | 30 dni |
| Cena przesyłki | 0 |
| Dostępność |
|
| Kod kreskowy | |
| EAN |
Zamówienie telefoniczne: 722-797-900
| Zostaw telefon |
LiDAR DJI Zenmuse L1

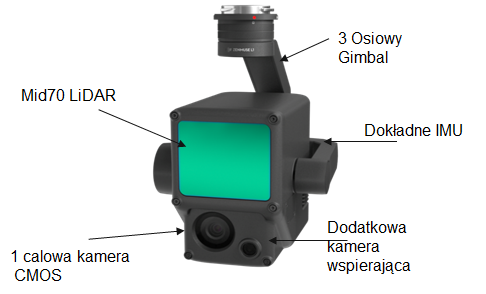
DJI L1 to wysoce zintegrowany, ekonomiczny, łatwy w użyciu skaner laserowy LiDAR. Rozwiązanie DJI L1 integruje czujnik Livox LiDAR, High Precision IMU, 1-calową kamerę CMOS z mechaniczną migawką i 3-osiowy stabilizowany gimbal. W połączeniu z DJI M300 RTK i DJI Terra, DJI L1 zapewnia wysoce wydajne powietrzne rozwiązanie LiDAR AIO do uzyskiwania chmury punktów 3D w czasie rzeczywistym dla wysokiej dokładności i szczegółowych potrzeb w zakresie rekonstrukcji. Nadaje się do różnych branż, takich jak energia, AEC, leśnictwo, bezpieczeństwo publiczne.
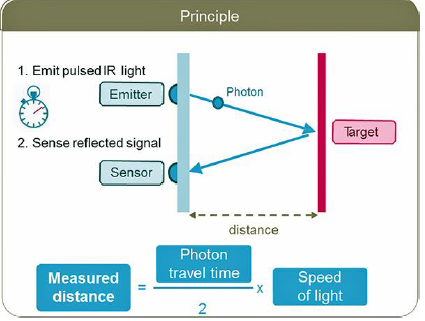
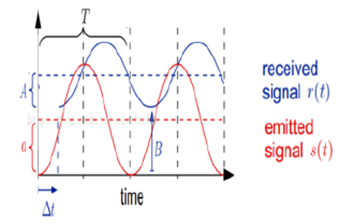
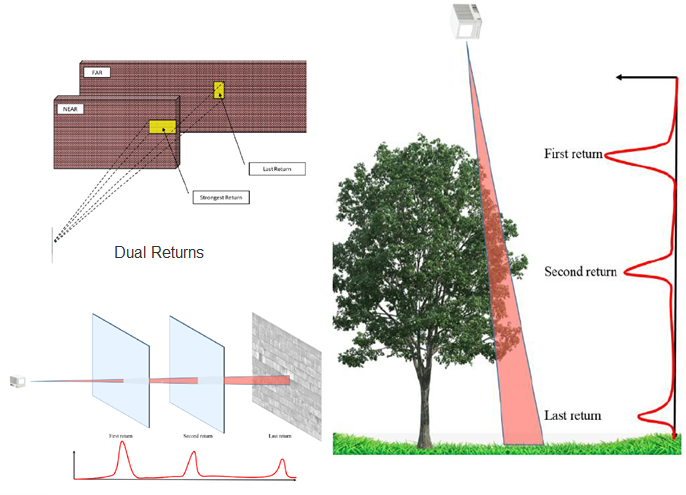
Zasada działania LiDAR
Jednostka LiDAR oblicza położenie i kierunek celu na podstawie zmierzonej zmiennej czasu powrotu wiązki lasera.
DJI L1 - Pierwszy powietrzny LiDAR od DJI
All-In-One: LiDAR, kamera geodezyjna i mapująca, IMU o wysokiej precyzji
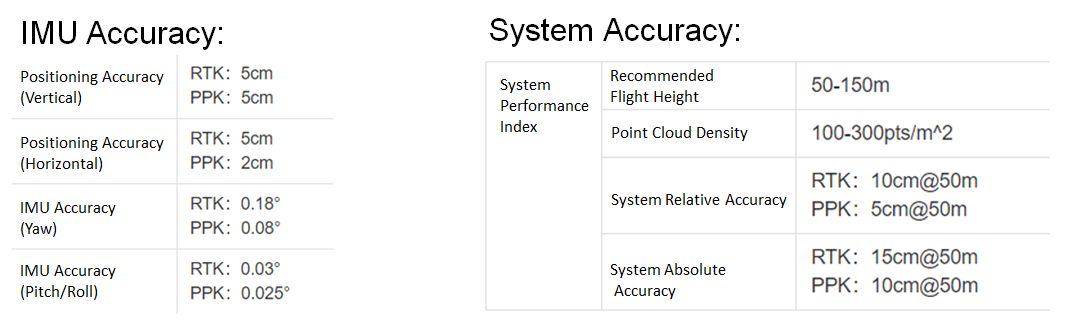
Wysoka dokładność: w pionie: 5 cm / w poziomie: 10 cm [1]
Wysoka wydajność: zasięg 2 km2 [2] w jednym locie
Chmura punktów o wysokiej gęstości: 240 000 efektywnych punktów / s
Wielokrotne zwroty: Obsługa trzech zwrotów [3]
Zakres pomiarowy: 450 m [4] Max
Stopień ochrony przed wnikaniem: IP44
Podgląd na żywo chmury punktów w czasie rzeczywistym: możliwość wyświetlania i pomiaru chmury punktów w czasie rzeczywistym
Obsługa DJI Terra do przetwarzania końcowego
[1] Z wysokością lotu: 50m
[2] Prędkość lotu: 10 m / s, wysokość lotu: 100 m, współczynnik zachodzenia boków: 20%
[3] Podwójne i potrójne zyski , Gęstość chmury punktów 480 000 pkt / sek
[4] 80% współczynnik odbicia, 0 klx
Moduł laserowy - Livox

Zakres pomiaru 190 m przy odbiciu 10%
Obsługa większości 3 zwrotów
240 000 efektywnych punktów / s pierwszy powrót
FOV 70 °
Dwa wzorce skanowania: nie powtarzające się skanowanie płatków + skanowanie liniowe
Odległość pomiarowa na DJI L1 wynosi 190 m przy 10% odbiciu.
Odbicie odnosi się do stosunku odbitej energii lasera do padającej energii lasera, różne obiekty mają różne współczynniki odbicia powierzchni:
Na przykład:
Odbicie na większości powierzchni naziemnych przekracza 10%
Odbicie na powierzchni budynku wynosi około 50%
Odblask na nawierzchni węglowej i asfaltowej wynosi około 20%
|
Rodzaj powierzchni |
Pustynia |
Ciało |
Woda |
Suche szkło |
Mokre szkło |
Śnieg |
Lód |
|
Odbicie |
0.24-028 |
0.1-0.2 |
0.08-0.09 |
0.15-0.25 |
0.14-0.26 |
0.81 |
0.69 |
L1 obsługuje 3 zwroty, możnae ustawić liczbę zwrotów w DJI Pilot
Może mierzyć zarówno DEM, jak i DSM
Potrafi obliczyć wysokość roślinności
Przebiłby szkło i zmierzyłby przedmiot z tyłu
Moduł kamery w DJI L1
1-calowa kamera CMOS zapewnia rzeczywiste dane renderowania kolorów w czasie rzeczywistym dla modułu LiDAR co wyróżnia DJI L1 i inne czujniki LiDAR na rynku. Ładunek wyposażony jest również w drugą kamerę - Kamera wizualnego asystenta: Gdy dron nieoczekiwanie utraci sygnał GNSS, DJI L1 może stale korzystać z kamery wizualnego asystenta, aby otrzymywać dane dotyczące orientacji i utrzymywać dokładność systemu w krótkim czasie. (60 s)
Specyfikacja kamery CMOS:
20 mln efektywnych pikseli
1-calowy CMOS
Migawka mechaniczna
Taka sama specyfikacja kamery w Phantom 4 RTK
Ultradokładne IMU w L1
Wysoka dokładność IMU jest podstawą wysokiej dokładności systemu Lidar DJI L1 wykorzystuje zarówno wysokiej dokładności IMU, jak i kamerę z asystentem wizualnym, aby zapewnić wysoką dokładność danych wyjściowych IMU.
Widok na żywo chmury punktów
Wyświetlaj dane chmury punktów w aplikacji Pilot w czasie rzeczywistym, zbieraj informacje z pierwszej ręki w terenie i zapewniaj wsparcie danych dla decydentów w krótkim czasie.
Wyświetl model w czasie rzeczywistym jako skanowanie L1, wyświetl model podczas skanowania, możesz wyczyścić wyświetlacz w dowolnym momencie
Możliwość przełączania przeglądarki chmur punktów w czasie rzeczywistym i przeglądarki kamery wizualnej. Użytkownik może również ustawić podzielony ekran do wyświetlania obu przeglądarek.
Wiele trybów kolorów: współczynnik odbicia, wysokość, widzialność
Dostępne pomiary pozycji, odległości i powierzchni z danymi chmury punktów
POI: szybko zaznacz punkt zainteresowania
Potrafi przeciągać, obracać i powiększać model za pomocą gestów dotykowych

Obróbka danych za pomocą DJI Terra
DJI Terra w wersji V2.4: Obsługuje przetwarzanie końcowe DJI L1
Wybierz katalog folderu LiDAR, Terra automatycznie zidentyfikuje chmurę punktów, zdjęcia, dane GNSS, dane stacji bazowej i dane IMU
Dostępne tryby kolorów: Widoczny, Współczynnik odbicia, Wysokość, liczby zwrotne
Formaty wyjściowe: PNTS, LAS, PLY, PCD, S3MB; Wyjście modelu siatki 3D (Wsparcie później)
Typy pomiarów: punktowy, liniowy, obszarowy, objętościowy

Dodatkowe opcje w lidarze DJI L1
System zarządzania stanem ładunku HMS
Wbudowany w aplikację DJI Pilot, system zarządzania stanem ładunku rejestruje całkowity czas użytkowania DJI L1, liczbę czasów obrotu gimbala i zapewnia historyczne anomalie / błędy systemu oraz sugestie dotyczące konserwacji produktu.
Statyczne skanowanie panoramiczne
Wyposaż M300 RTK w zestaw gimbala skierowanego w górę, aplikacja Pilot może kontynuować i skanować obszar
Lot ze świadomością terenu w czasie rzeczywistym
Czujnik LiDAR uzyskiwałby wysokość statku powietrznego nad ziemią w czasie rzeczywistym i wykonywałby lot ze świadomością terenu, aby zapewnić jakość danych i bezpieczeństwo lotu.
Raport o dokładności
Po zakończeniu lotu aplikacja DJI Pilot natychmiast wygeneruje raport z inspekcji, wyświetli jakość danych chmury punktów, pozycję zdjęcia, liczbę zdjęć, status RTK, aby pilot mógł potwierdzić jakość danych terenowych na miejscu
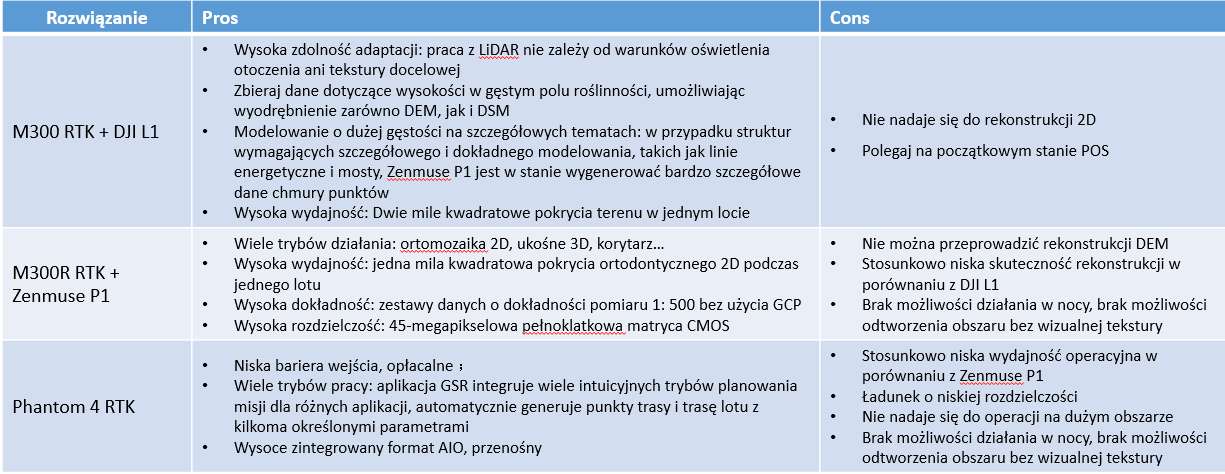
Porównanie LiDAR L1 z klasyczną fotogrametrią:
Specyfikacja techniczna LiDAR DJI L1
|
Parameters |
|
|
Weight |
900g |
|
Ingress Protection Rating |
IP44 |
|
Measurement Range (10% Reflectivity) |
200m |
|
Typical Operating Altitude |
50-150m |
|
Surveying Accuracy (100m) |
3cm |
|
Point Rate |
240,000 points/s (first or strongest return); |
|
Scanning Patterns |
Circular, Non-Repetitive Linear |
|
FOV |
Circular: FOV 70.4°(Horizontal) x 77.2°(Vertical); |
|
Returns |
3 |
|
IMU Update Frequency |
200Hz |
|
IMU Yaw Accuracy |
PPK: 0.08° |
|
IMU Pitch/Roll Accuracy |
PPK: 0.025° |
|
Visual Sensor Effective Pixels |
20M |
